CoppeliaSim Setup / Overview
Read all the documents in this lab script before starting to do/type anything. Ask if anything is unclear before doing something.
If you do something you need to know what effect it will have, otherwise you could damage the VM or ROS and be unable to work properly.
Using CoppeliaSim
CoppeliaSim Environment
Once you have been instructed to run CoppeliaSim, follow the instructions below:
Prerequisites: Open a terminal window and run ROSCORE. Then open another terminal window.
Run CoppeliaSim: from the new terminal window and go to the executable folder. For example:
cd /opt/CoppeliaSim_EduRun the following command:
./coppeliaSim.shEverything you require should be installed. If not, let me (Dr. Assaf) know I will provide you with a library and instructions on where to install it.
To access to the environment once CoppeliaSim is open (as shown in )…
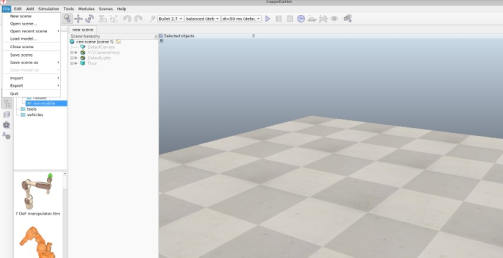
…click File → Open scene…
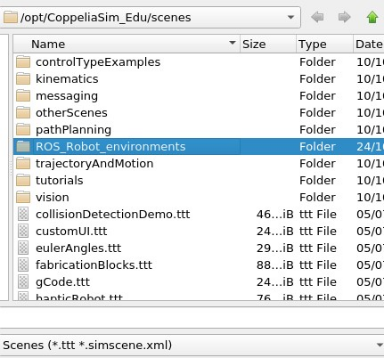
…enter in the folder ROS_Robot_environments (as shown in )…
…and select obstacle_env.ttt, as shown in .

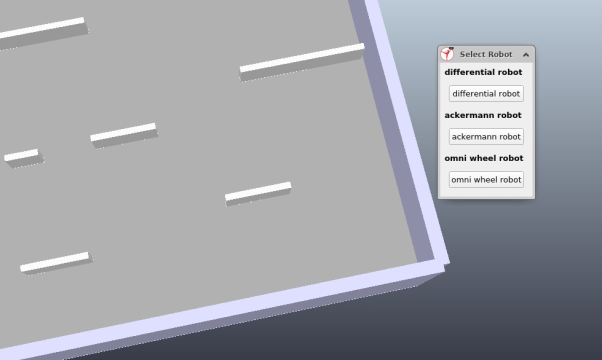
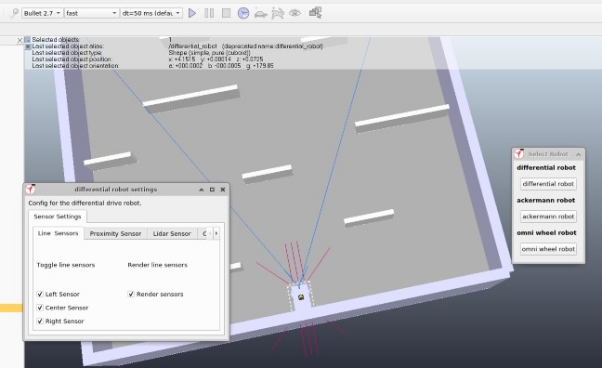
After loading the scene you should see a dialog box. Select differential robot.
Hopefully at this point you won’t get any errors, and will arrive at a screen that looks like the one shown in , below.
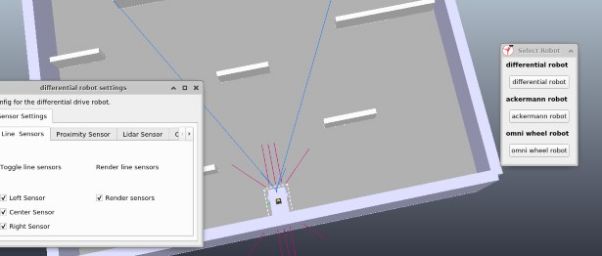
If all is well you should see something like , below.
Before running your ROS code - start the simulation with the play button.
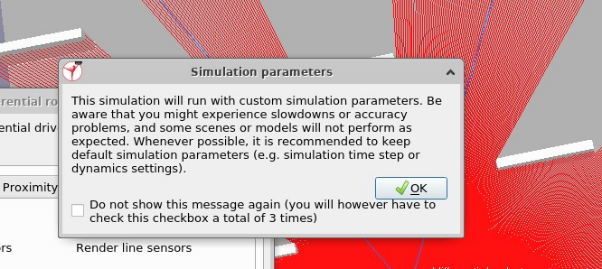
Be sure to click ok on the screen shown in below, before running your ROS code.
Check if Everything is Working as Expected
Open a new terminal window.
Before anything you should check all the elements are connected.
A tell-tale sign is to visualize the topics currently available. To do this, run the following command in your terminal window in your current workspace:
rostopic listYou should see a list of topics like that shown in below.
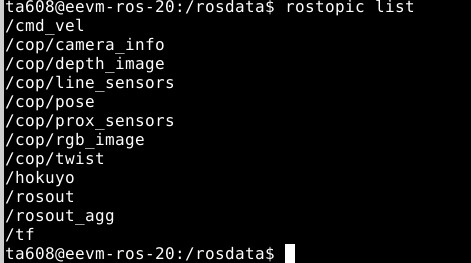
If /cop/ topics or cmd_vel are not present, something went wrong.
If you see those topics, let’s check if they are actually active by running the following command:
rostopic echo + <name of topic> e.g.:
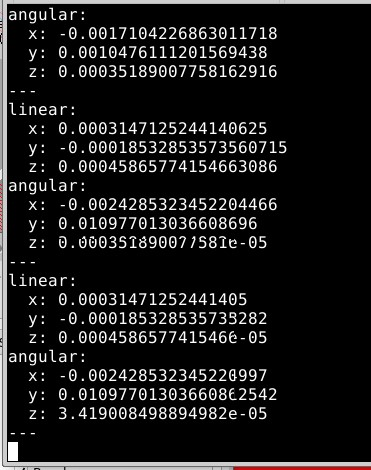
rostopic echo /cop/twistYou should receive a response like that shown in below.
Press Keys: ctrl+c to terminate the echo command.
Another example, this time a sensor topic. Input command:
rostopic echo /cop/prox_sensorsThe output response is shown in below.
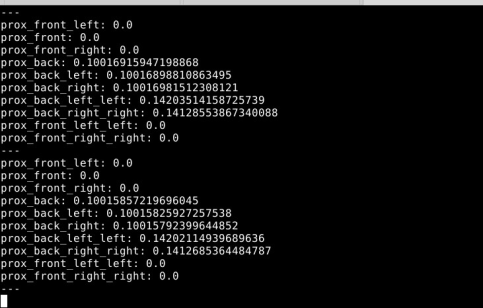
Press Keys: ctrl+c to terminate the echo command.