My research is in the field of Dynamics and Control. Broadly speaking this means I'm interested in analysing, modelling, and controlling anything that moves. More specifically, I tend to focus on projects involving rotorcraft, autonomous unmanned aerial systems, smart actuation and hybrid simulation (aka hardware in the loop). Much of what I do falls into the category of robotics one way or another. Here are some examples.
Autonomous Aerial Refuelling
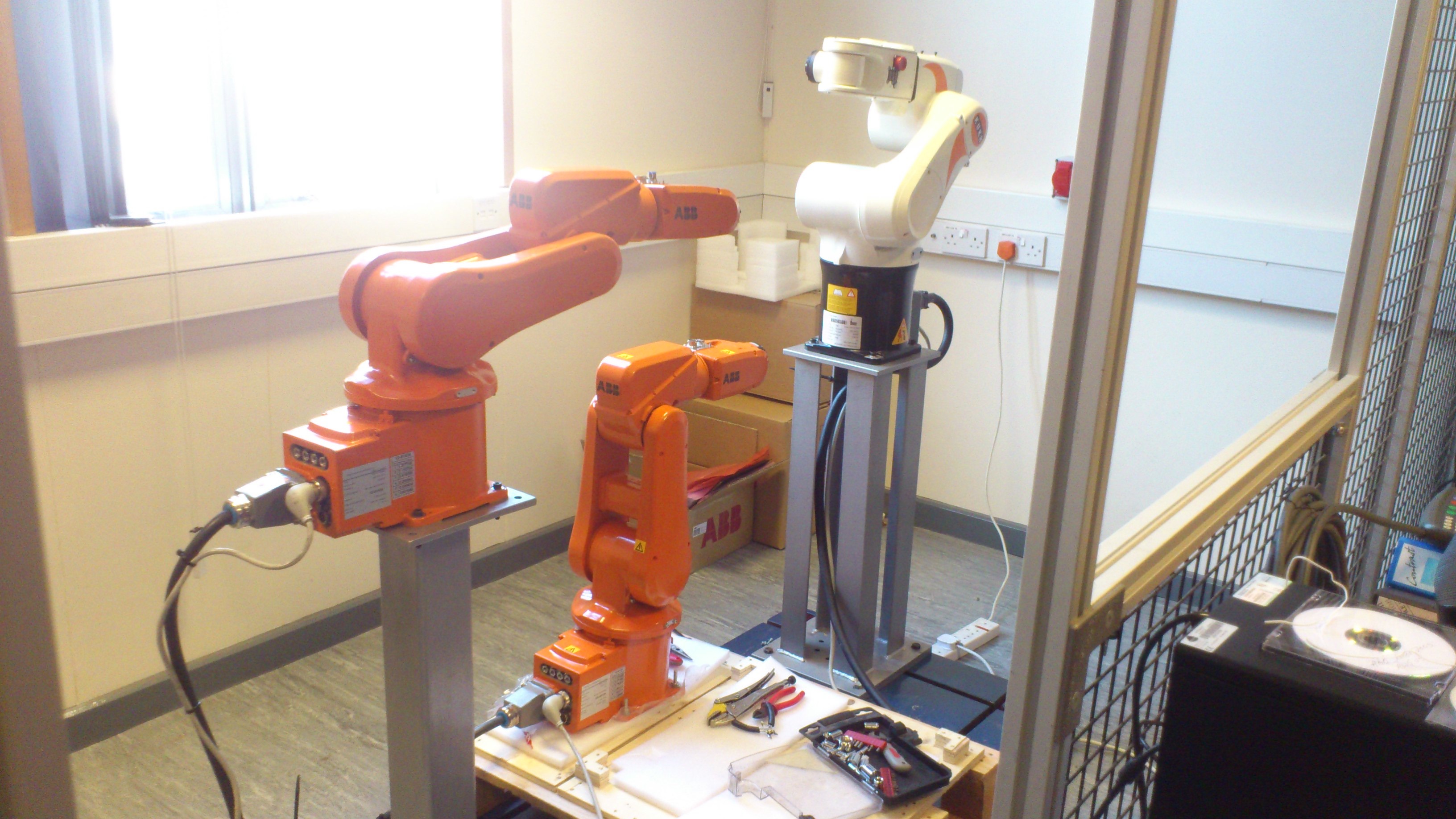
 This project, conducted in conjunction with Cobham as part of the ASTRAEA II programme, culminated in 2012 with the successful demonstration of autonomous air-to-air refuelling capabilities in a hybrid simulation, or hardware-in-the-loop style test. The tests incorporated bespoke sensors and data fusion algorithms and real flight hardware mounted on robotic manipulators. The robots closed the loop which incorporated a simulated environment comprising in-depth modelling of the aerodynamic conditions and aircraft dynamics, and purpose-designed guidance, navigation and control systems.
This project, conducted in conjunction with Cobham as part of the ASTRAEA II programme, culminated in 2012 with the successful demonstration of autonomous air-to-air refuelling capabilities in a hybrid simulation, or hardware-in-the-loop style test. The tests incorporated bespoke sensors and data fusion algorithms and real flight hardware mounted on robotic manipulators. The robots closed the loop which incorporated a simulated environment comprising in-depth modelling of the aerodynamic conditions and aircraft dynamics, and purpose-designed guidance, navigation and control systems.
Working with: University of Bristol, Cranfield University, Cobham Mission Equipment, TRW Conekt, SEA, Technology Strategy Board
Hybrid Testing (Hardware-in-the-Loop)
 Investigation into contact dynamics in hybrid tests, in particular looking at using serial robotic manipulators to test aerial refuelling hardware. The refuelling hardware is coupled with numerical models of the aerial environment.
Investigation into contact dynamics in hybrid tests, in particular looking at using serial robotic manipulators to test aerial refuelling hardware. The refuelling hardware is coupled with numerical models of the aerial environment.
Working with: Mario Bolien (PhD student, Univeristy of Bath), Pejman Iravani (Co-supervisor, University of Bath), University of Bristol, Cobham Mission Equipment
Smart rotor concepts for active vibration control
 Working with AgustaWestland Helicopters on the REACT programme, this project looked at a variety of smart rotor concepts, including the development and testing of an active damper to reduce vibration within the rotor hub environment and the design of a future generation full scale active rotor blade. The work encompassed the investigation of novel piezoelectric actuation technology for trailing edge flap actuation, and development of a hybrid simulation facility for evaluation of the active damper.
Working with AgustaWestland Helicopters on the REACT programme, this project looked at a variety of smart rotor concepts, including the development and testing of an active damper to reduce vibration within the rotor hub environment and the design of a future generation full scale active rotor blade. The work encompassed the investigation of novel piezoelectric actuation technology for trailing edge flap actuation, and development of a hybrid simulation facility for evaluation of the active damper.
Working with: AgustaWestland Helicopters, University of Leicester, University of Liverpool, Noliac, Technology Strategy Board
Cycloidal rotor systems
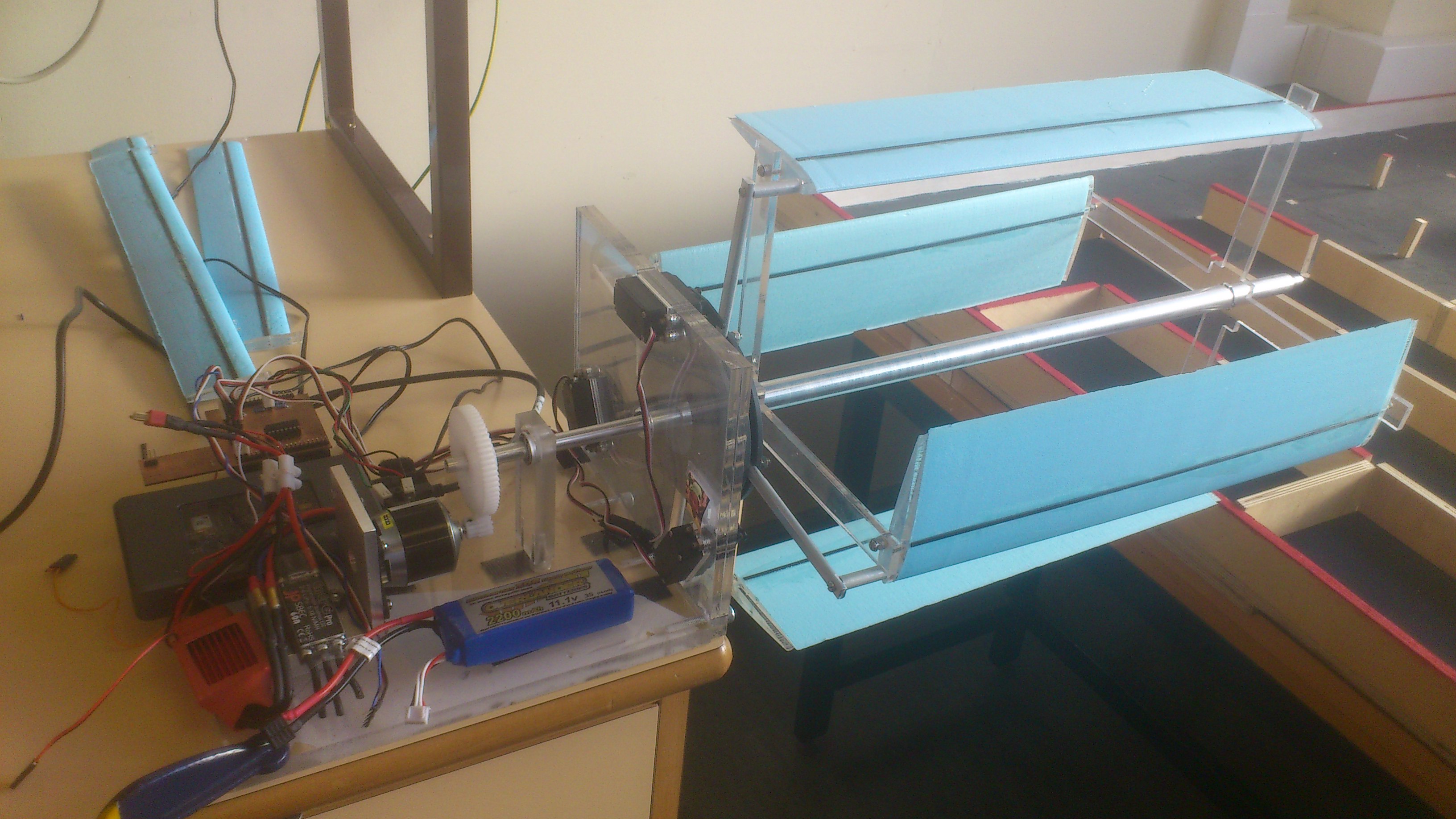 Cycloidal rotors offer advantages over traditional rotorcraft configurations, including thrust vectoring capabilities and better theoretical aerodynamic efficiencies under a range of flight conditions. There are complications, not least of which are concerned with the structural challenges associated with centrifugal bending forces. This research is at an early stage and is moving towards creating a baseline aircraft for further testing.
Cycloidal rotors offer advantages over traditional rotorcraft configurations, including thrust vectoring capabilities and better theoretical aerodynamic efficiencies under a range of flight conditions. There are complications, not least of which are concerned with the structural challenges associated with centrifugal bending forces. This research is at an early stage and is moving towards creating a baseline aircraft for further testing.
Working with: Tom Brown (MEng student, University of Bath), Alex Squire (MEng student, University of Bath)
Digital hydraulics for regenerative actuation & vibration control
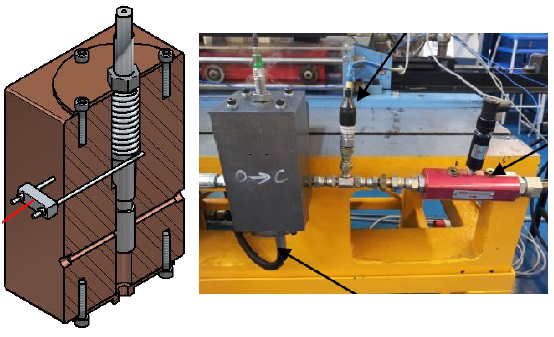 This research theme looks at using digital hydraulics to implement a regenerative actuation system capable of recovering energy from a moving system and storing and reusing that energy to produce motion at a later moment in time. In particular, the application of this technology to vibration control is addressed.
This research theme looks at using digital hydraulics to implement a regenerative actuation system capable of recovering energy from a moving system and storing and reusing that energy to produce motion at a later moment in time. In particular, the application of this technology to vibration control is addressed.
Working with: Sebastian Bush-Hipwood (MEng student, University of Bath)
Condition Monitoring
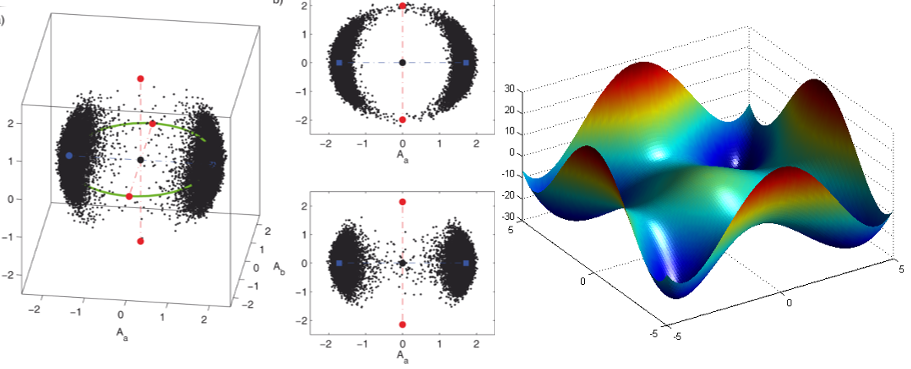 Advanced signal processing techniques for feature extraction in condition monitoring. Specifically looking at stochastic resonance as a basis for low-power, distributed condition monitoring technologies in rotary plant. Stochastic resonance is a nonlinear phenomenon which can be used to amplify periodic signals obfuscated by poor signal-to-noise ratios.
Advanced signal processing techniques for feature extraction in condition monitoring. Specifically looking at stochastic resonance as a basis for low-power, distributed condition monitoring technologies in rotary plant. Stochastic resonance is a nonlinear phenomenon which can be used to amplify periodic signals obfuscated by poor signal-to-noise ratios.
Working with: Leonardo Barbini (PhD student, U.Bath), Matt Cole (Co-supervisor, U.Bath), Andy Hillis (Co-supervisor, U.Bath)